|
I am currently a Second Year Phd Student at Computational and Data Sciences (CDS) in IISc, Bangalore, India, working on Generative models, Computer Vision, Neural Operators and Few-Shot Learning under the supervision of Dr. Deepak Subramani. Prior to this, I completed my MTech Robotics and Autonomous systems at RBCCPS in IISc, Bangalore, India, where I focused on Reinforcement Learning and Generative models based locomotion of walking robots, under the guidance of Dr.Shishir.N.Y at Stochastic Robotics Lab at IISC. I am particularly interested in developing Intelligent Stochastic Systems.
My doctoral research focuses on Generative Models, Computer Vision, Neural Operators, Few-Shot Learning. |

|
Publications |
|
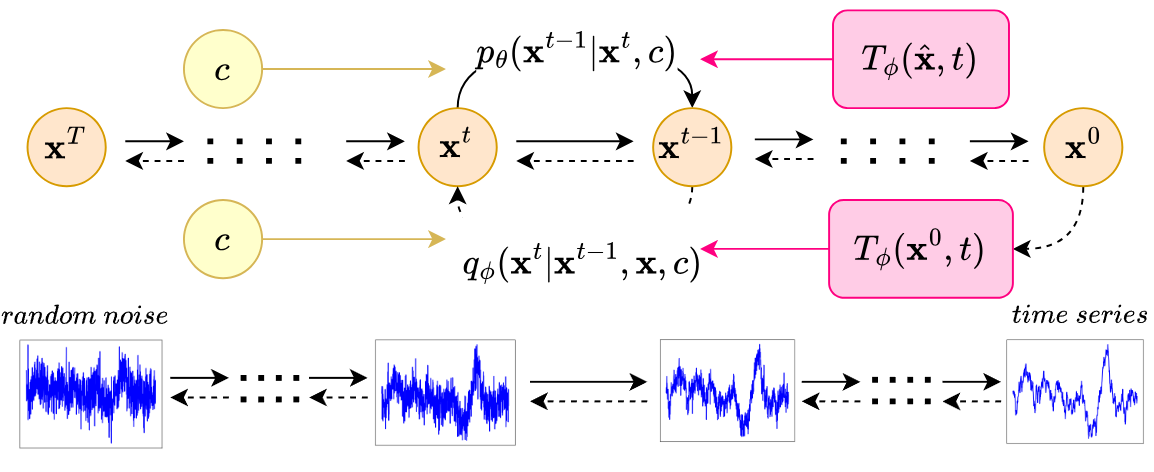
Conditional Diffusion Model with Nonlinear Data Transformation for Time Series Forecasting
J Rishi*, GVS Mothish* , Deepak Subramani Accepted @ ICML , 2025 ; Primary Area: Deep Learning->Generative Models and Autoencoders Website * Denotes Equal Contributiion Conditional Diffusion with Nonlinear Data Transformation Model (CN-Diff), a generative framework that employs novel nonlinear transformations and learnable conditions in the forward process for time series forecasting. A new loss formulation for training is proposed, along with a detailed derivation of both forward and reverse process. |
|
|
BiRoDiff: Diffusion policies for bipedal robot locomotion on unseen terrains
GVS Mothish, Manan Tayal, Shishir Kolathaya ICC , 2024 project page / video / paper TL;DR : A Diffusion Model based Walking Policies for Bipedal Robot Walking on Unseen Terrains We have designed a real-time robot controller based on diffusion models, which not only captures multiple behaviours with different velocities in a single policy but also generalizes well for unseen terrains. Our controller learns with offline data, which is better than online learning in aspects like scalability, simplicity in training scheme etc. |
|
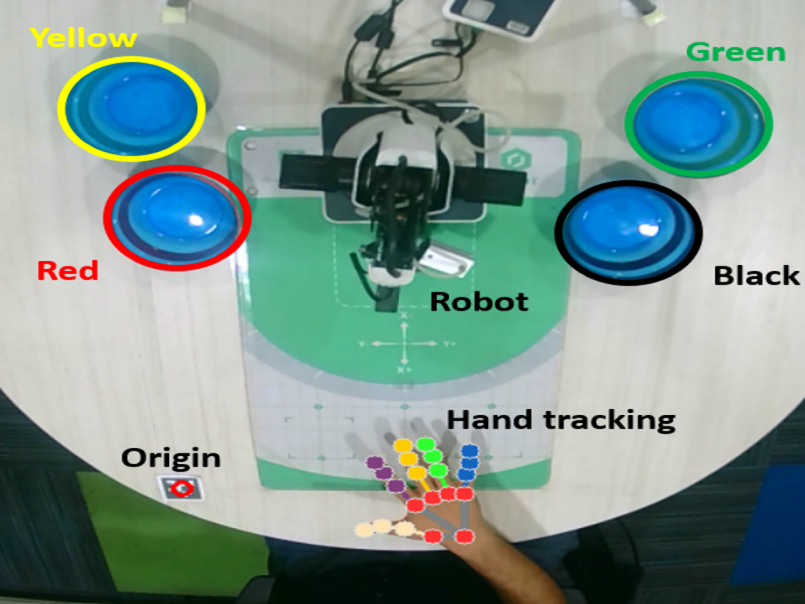
Multimodal Target Prediction for Rapid Human-Robot Interaction
Mukund Mitra, Ameya Avinash Patil, GVS Mothish, Gyanig Kumar, Abhishek Mukhopadhyay, Murthy LRD, Partha Pratim Chakraborty, Pradipta Biswas ACM IUI, 2024 paper TL;DR : An Inverse Reinforcement Learning based Target Prediction using Eye Gauge and Hand movement A multimodal intent prediction algorithm involving hand and eye gaze using Bayesian fusion. Inverse reinforcement learning was leveraged to learn human preferences for the human-robot handover task. |
|
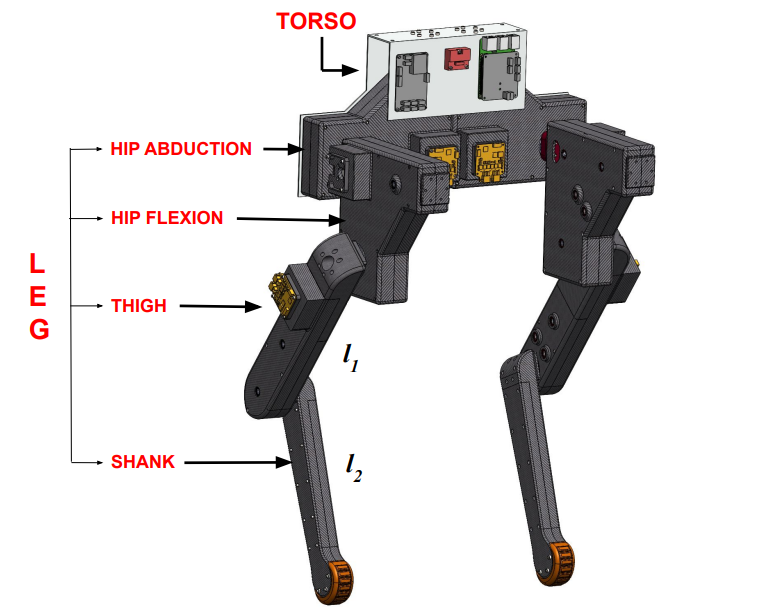
Stoch BiRo: Design and Control of a Low-cost Bipedal Robot
GVS Mothish , Karthik Rajgopal, Ravi Kola, Manan Tayal, Shishir Kolathaya ICCAR , 2024 project page / video / paper TL;DR : A Modular Bipedal Robot design and Walking controller based on Linear Policies This paper introduces the Stoch BiRo, a cost-effective bipedal robot designed with a modular mechanical structure having point feet to navigate uneven and unfamiliar terrains. The robot employs proprioceptive actuation in abduction, hips, and knees, leveraging a Raspberry Pi4 for control. |
Articles Under Review |
| Note : Full title have been withheld due to double-blind review protocols. |
|
(1) A novel Diffusion model based Time Series Analysis - ICLR 2025
GVS Mothish * , Rishi J *, Deepak Subramani |
|
(2) Neural operator for Computer vision tasks (first Neural operator in that field) - TMLR 2025
GVS Mothish , Rishi J, Shobhit S, Deepak Subramani |
|
(2) Implicit Neural Network based Field Reconstruction - ICLR 2025
Rishi J * GVS Mothish * , V Khapre, Deepak Subramani |
Other Projects |
|
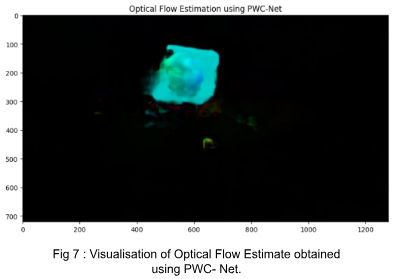
Apr 2023 project info • This was developed as a part of coursework for Robotic Perception course. • PWC-NET a CNN-based approach was used to estimate the optical flow from the successive video frames. • Yolo V5 was used for object detection in the given frame. • Calculated the relative movement of predicted object’s movement with optical flow vectors |
|
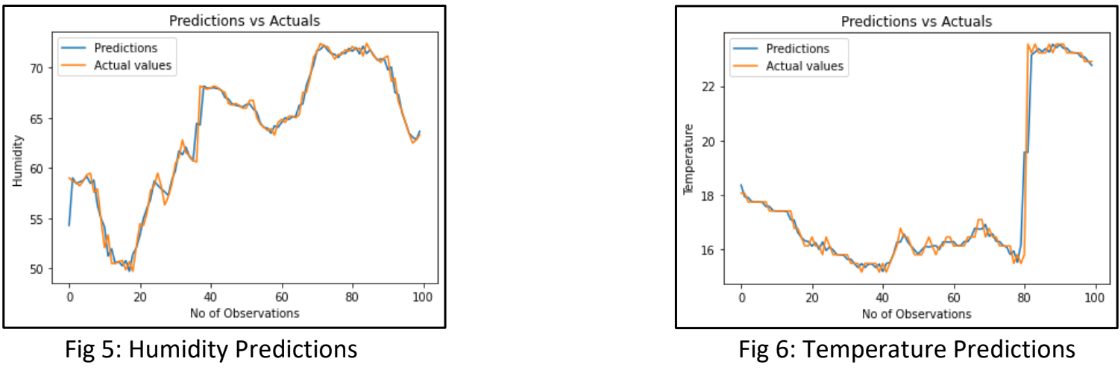
Mar 2023 project info • Aim: Predict missing values in IoT sensor data (temperature and humidity) using Bayesian methods. • Phases: Data analysis, pre-processing, and transitioning from Frequentist to Bayesian approaches. • Bayesian Models: Bayesian Ridge Regression, Gaussian Process Regression, and PyMC3 used for accurate imputation. |
|
|
Jun 2023 project info • Object detection (Yolo) and Lane Detection (UltraFast Lane detector) module was developed using pytorch framework. While the Depth Estimation (MiDaS) was developed using TensorFlow framework. • The inference time of the model was optimized using the Intel oneAPI Deep Neural Network Library on the intel’s developer’s cloud. • A performance speedup of approximately 4.5x was achieved using the oneAPI libraries. |
|
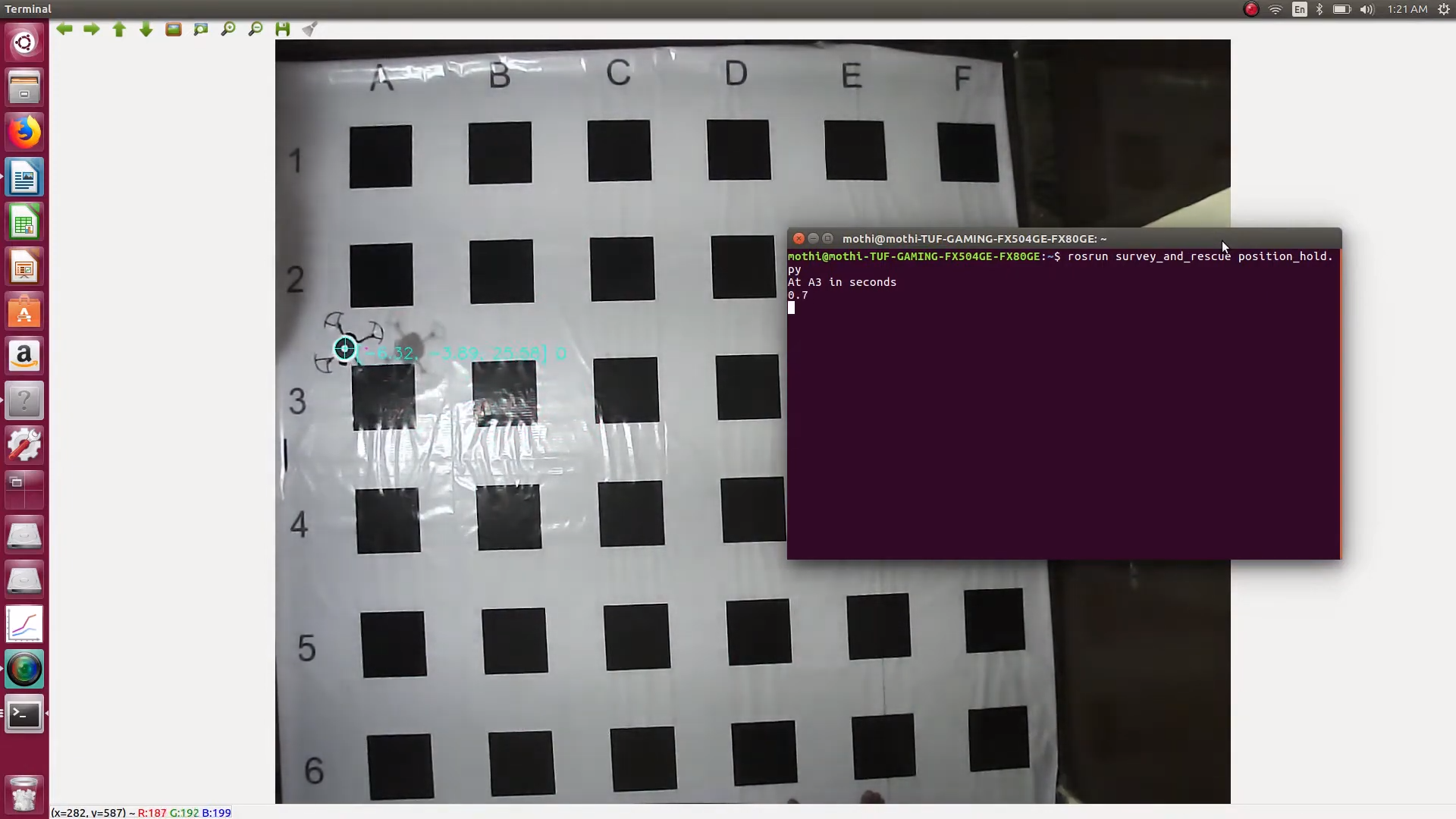
2020 video This is a Sponsored project under the supervision of Eyantra IIT-Bombay and MHRD, and a part of the Robotics Competition organized by Eyantra. |
Awards and Acheivements
|

|
University Gold Medal in bachelor's degree.
5th convocation Presidency University , 2022 website For the Outstanding academic performance in B.Tech |

|
Finalist in FALLING WALLS LAB INDIA 2019.
German Centre for Research (DWIH) and Innovation and DAAD conference link Theme: Breaking the wall of irrigation challenges with Machine Learning and Internet of Things |

|
2nd place in Intel OneAPI Hackathon.
Intel 2023 link Worked with Intel AI Analytics Toolkits and Intel optimized frameworks such as TensorFlow, PyTorch. |

|
AI and Robotics Technology park Fellowship.
Artpark and Ministry of Education | Government of India link Top up fellowship for the Masters project awarded by ARTPARK. |
|
|